颠覆未来:基础模型如何塑造全能机器人!
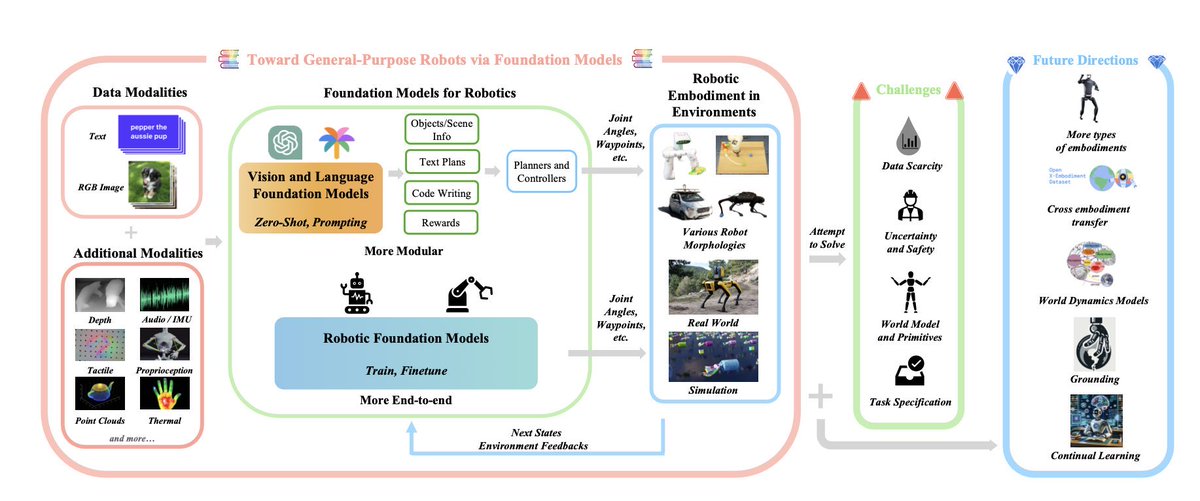
这张图展示了如何通过基础模型推动通用机器人的发展,涵盖从数据输入到未来方向的完整路径。
数据模式
- 文本与RGB图像:基础数据输入。
- 附加模式:包括深度、音频、触觉、温度等多种感知输入,提升机器人的环境理解能力。
基础模型应用
- 视觉与语言基础模型:利用零样本学习和提示生成对象信息、场景描述、文本计划和代码编写等功能。
- 模块化设计:通过训练和微调实现更模块化和端到端的机器人应用。
机器人在环境中的体现
- 多种形态的机器人:适应真实世界和模拟环境,处理不同关节角度和路径点。
- 实时反馈机制:从环境中获取下一状态反馈以优化决策。
挑战
- 数据稀缺性:需要解决的数据获取问题。
- 不确定性与安全性:确保操作安全可靠。
- 世界模型与任务规范:开发更精确的任务执行标准。
未来方向
- 更多类型的体现形式:扩展机器人的适用场景。
- 跨体现转移学习:提高在不同环境中的迁移能力。
- 世界动态模型和持续学习:加强对复杂环境的理解与自我更新能力。
这幅图揭示了通用机器人发展的关键要素和挑战,指明了未来技术进步的方向。